The success of AGVs and AMRs depends on greater autonomy and intelligence
- 2 days ago
- 5 min read

System simulation for medical device companies
AGV and AMR manufacturers are under pressure to reduce the development time of highly customized solutions while also increasing the reliability of autonomous systems. In addition, the integration of vehicle dynamics, electric propulsion, sensors, navigation algorithms, and control systems makes each new project more complex. In this scenario, system simulation enables engineering decisions to be validated before physical prototypes are built.
Today, autonomous robots are used in areas such as logistics, manufacturing, distribution centers, and mining. In a less common application, this type of technology is also present in hospitals.
Currently, the medical device industry is following the broader trend toward more autonomous systems. Medical disinfection robots are used to sterilize hospitals, including waiting rooms and patient rooms, as well as parking lots, shopping malls, and other public spaces, with the major advantage of avoiding additional human exposure to viruses through the use of these robots.
Autonomous medical disinfection robots in a 3D environment for sanitizing rooms
In an application developed using Siemens engineering software and services, new dedicated AMRs were designed. They combine an electrically powered autonomous platform with a disinfection system mounted on top. Typically, this system includes liquid micro-spray nozzles that apply disinfectant to surfaces, or ultraviolet C (UVC) lights to purify the air. The goal is to destroy all airborne pathogenic microorganisms. In this way, disinfection robots sanitize these environments, allowing people to use them later for their normal activities.
Development challenges and system simulation
System simulation can help reduce development time by decreasing the number of costly physical prototypes and testing campaigns. A crucial factor in the development cycle of autonomous robots is autonomous operation and the ability to navigate new environments. This is achieved through a combination of computer vision, including cameras, LiDARs, short-range radars, and other sensors, sensor fusion, control logic, and vehicle dynamics, enabling robots to operate easily in different situations and on various types of flooring.
When physical interaction with an infected environment represents a significant risk to humans, an autonomous robot can perform simple and repetitive tasks. Many robotics solutions control the robot’s movement remotely. However, an autonomous robot can move on its own to perform its functions. It uses computer vision, obtained through various onboard sensors, and a typical perception-reasoning-action algorithm, which provides the correct commands to the actuators without the need for human presence and, consequently, without the risk of viral contamination.

Typical challenges for AGVs (“Automated Guided Vehicles”) and AMRs (“Autonomous Mobile Robots”)
In this article, we would like to present some ideas on how a simulation-based approach can support the development of autonomous robots, from system sizing and sensor design to the verification and validation of the final control algorithms.
A simulation framework for autonomous systems
The simulation framework combines different Siemens tools that have already been successfully implemented in several autonomous applications across multiple industries. Examples include autonomous cars in the automotive industry, drones and UAMs, or urban air mobility, in the aeronautics sector, autonomous agricultural vehicles in heavy equipment, and even military tanks operating in hostile environments in the defense sector. Consequently, the same simulation architecture can be applied to emerging medical robot applications, which must meet slightly different requirements.
This framework integrates several software tools that perform time-domain simulations. An alternative workflow would consist of directly connecting Simcenter Amesim and Simcenter Prescan through FMI, or Functional Mock-up Interface, which is available in both tools.

Simulation framework with the different tools involved
Simcenter Amesim® represents the vehicle dynamics and electric propulsion.
Simcenter Prescan® represents the hospital environment and models the sensors that detect the presence of objects in the environment, such as cameras, LiDARs, short-range radars, and others.
Simulink® connects Simcenter Amesim and Simcenter Prescan.
In addition, ROS, or Robot Operating System, was used for sensor fusion and control algorithms, which provide the actuator commands to the vehicle model in Simcenter Amesim.
Overview of the data flow and customized 3D scenes
The robot state is transferred from Simcenter Amesim to Simulink, which provides the updated position and orientation of the robot to Simcenter Prescan. Simcenter Prescan then provides the virtual sensor data to the ROS operating system through Simulink. Finally, the ROS control algorithm sends the updated actuator commands to the Simcenter Amesim model so that it follows the correct path. At this point, the control loop is closed, and the robot can move autonomously within the environment, such as a hospital room, while avoiding collisions with detected obstacles.

Scope of activities and domains in the design of an autonomous mobile robot (AMR) for medical use
Regarding the modeling of environments such as hospitals, warehouses, or distribution centers, Simcenter Prescan allows the import of customized objects typical of these applications as CAD files:
Various geometries of autonomous mobile robots (AMRs),
Geometries for room layouts, corridors, slopes, beds, and obstacles,
Adverse conditions imposed by the natural environment, such as day and night, among others.
Thus, it is possible to represent real configurations and operating conditions.
Modeling the dynamics of the robotic vehicle and its 3D environment
The Simcenter Amesim model predicts the physical behavior and interactions of different subsystems in a three-wheeled vehicle. It features front-wheel drive, including the electric motors with their inverters, controllers, and a 24 V power supply battery, as well as passive rear-wheel drive. In addition, the model represents the vehicle dynamics, including its axles, chassis, and tires. The Simcenter Amesim digital twin was used to implement autonomous driving functions. The vehicle was then equipped with sensor models, and finally, the loop was closed by integrating the decision-making algorithm between the simulated sensor data and the vehicle model.

Simcenter Amesim model of the disinfection robot with its vehicle dynamics and electric propulsion
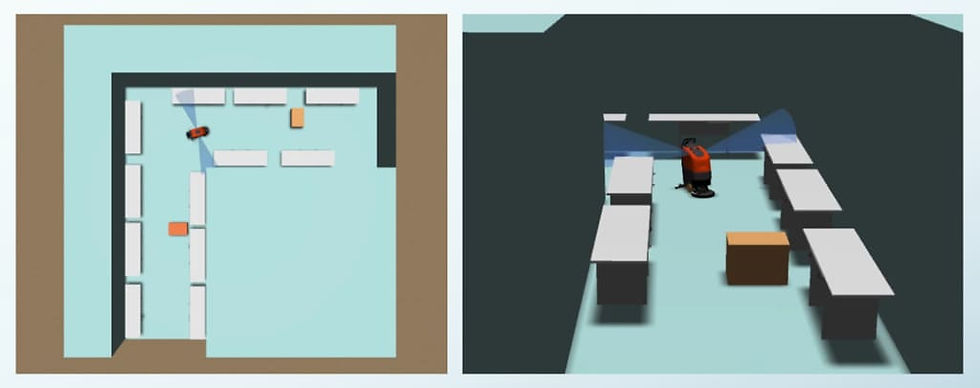
Multiple scenarios can be investigated, as well as how obstacle detection and avoidance functions allow the robot to move autonomously within this unknown 3D environment. The visualization of the 3D scene from different perspectives helps in understanding the simulation results. For this purpose, several camera orientations were used, along with sensor fusion from the ROS library for video processing.
3D views from different camera orientations
It is now clear how the combination of Simcenter Amesim and Simcenter Prescan supports the development and validation of AGVs and AMRs throughout the entire design cycle. By integrating multidisciplinary models of the vehicle, environment, and sensors into a single simulation workflow, engineering teams can evaluate system performance much earlier in the development cycle. This approach reduces technical risks, anticipates integration issues, and accelerates decision-making during development.
With a simulation platform, it is possible to validate the vehicle architecture, compare different sensor configurations such as LiDAR, cameras, and radars, analyze battery autonomy across different operating profiles, and optimize control and navigation strategies. It is also possible to verify the vehicle’s dynamic stability in different scenarios, test perception and path-planning algorithms in virtual environments, and validate the embedded software before conducting field tests.
By transferring a significant portion of the verification steps to the virtual environment, physical testing campaigns become more focused and efficient, reducing the need for multiple prototypes and shortening development time. The result is a more agile engineering process, with lower validation costs and greater confidence in the performance of the AGV or AMR before its deployment in operation.
Gibin Joe Zachariah and Sagar Milind Supe carried out the case study above as part of their investigation work. They work with advanced smart products at Siemens Digital Industries Software (DISW) in Michigan, United States. Both are part of the Siemens Simcenter Engineering and Consulting Services team.
What a disinfection robot teaches us about the development of any modern AGV or AMR: system simulation enables faster development of intelligent devices, reducing prototype costs and validating autonomous solutions more efficiently. Want to understand how Simcenter technologies can support your engineering projects? Schedule a meeting with CAEXPERTS and discover how to apply advanced simulation to optimize your products and processes.
WhatsApp: +55 (48) 98814-4798
E-mail: contato@caexperts.com.br


